


分享|自动驾驶中间件:SOME/IP与DDS的对比与应用
在自动驾驶系统中,服务导向架构(Service-Oriented Architecture, SOA)中间件扮演着至关重要的角色,它实现了不同模块之间的高效通信和协作。SOA提供了一种基于服务的架构理念,使得各个模块能够以独立、灵活的方式进行开发、部署和扩展。
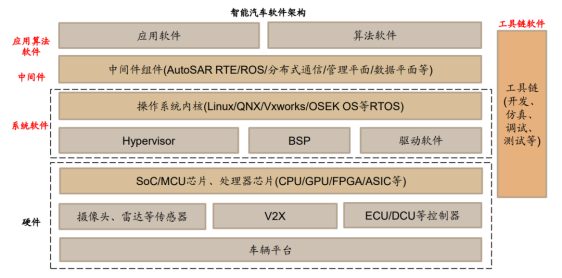
在自动驾驶领域,有几种常见的SOA中间件,它们为系统的模块化设计提供了有力支持:
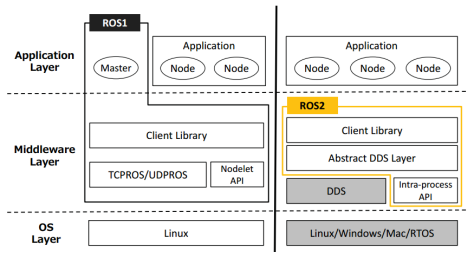
ROS(Robot Operating System):
ROS是机器人领域广泛应用的开源中间件,它提供了一系列丰富的工具和库,特别适用于构建模块化的自动驾驶系统。ROS支持消息传递和服务调用机制,使得不同模块之间能够轻松实现数据交换和功能调用。
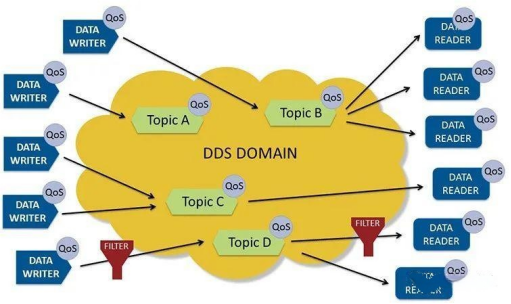
DDS(Data Distribution Service):
DDS是一种面向消息的中间件标准,以高性能、实时的数据分发和集成为核心目标。它采用松散耦合的通信方式,支持发布-订阅和点对点模式,非常适用于分布式自动驾驶系统中的数据交换需求。
Autoware:
Autoware是基于ROS和DDS构建的开源自动驾驶软件平台,它提供了一套完整的模块和算法,涵盖了感知、规划、控制等关键任务。通过ROS和DDS,Autoware实现了模块之间的高效通信和数据共享。
Apollo:
Apollo是百度公司开发的开源自动驾驶平台,它采用了基于ROS和DDS的架构设计,提供了全面的感知、规划、控制等模块,并支持高精地图和传感器融合。在Apollo中,ROS和DDS承担着模块间通信和数据交换的重要职责。
值得一提的是,ROS2作为ROS的升级版,实现了节点之间的直接通讯,无需依赖核心节点进行统一管理,从而提高了系统的稳定性和可靠性。百度在开发Apollo时,ROS2尚未面世,但Apollo基于DDS特性进行了开发,可以说在一定程度上是ROS2在自动驾驶领域的“百度版本”。然而,Apollo相比ROS2在自动驾驶领域具有更好的适配性和针对性。
接下来,我们重点探讨DDS与SOME/IP这两种通信协议在自动驾驶中间件中的应用与区别。
DDS与SOME/IP概述
DDS(Data Distribution Service):
DDS是一种开放标准的消息传递协议,旨在满足复杂分布式系统中的数据通信需求。它提供了高度可扩展、实时性强的消息传递机制,支持发布-订阅和请求-响应模式。DDS能够实现数据的快速、可靠、安全共享,广泛应用于各种领域的分布式应用。
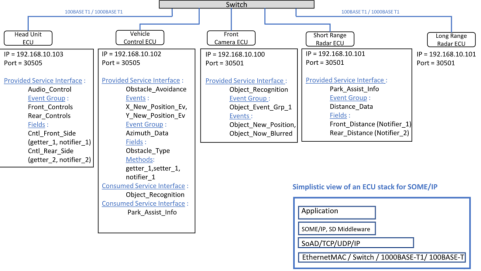
SOME/IP(Scalable service-Oriented MiddlewarE over IP):
SOME/IP是一种专门用于汽车电子系统中的通信协议,它基于IP网络,提供高可扩展性、低延迟和高带宽的通信能力。SOME/IP适用于车辆内部软件组件之间的通信,以及车辆与外部服务器之间的通信,具备实时性、可靠性和安全性等优点。
DDS与SOME/IP的区别
资源占有大小:
SOME/IP强调通信功能,体量相对较小,适用于资源有限的汽车电子系统。
DDS功能更为丰富,但体量相对较大,需要裁剪后才能更好地应用于自动驾驶系统。
使用场景:
DDS是一套面向数据的访问系统,特别适合多节点、大数据交互的应用场景,如自动驾驶系统中的传感器数据融合和分发。
SOME/IP则是一套面向服务的访问系统,便于实现RPC(远程过程调用)以及变更通知等功能。
灵活性、可伸缩性:
相较于SOME/IP,DDS引入了众多标准内置特性,如基于内容和时间的过滤、与传输无关的可靠性、持久性、存活性、延迟/截至时间监视、可扩展类型等,这些特性使得DDS在灵活性和可伸缩性方面具有显著优势。
在具体应用中,DDS和SOME/IP各有千秋。DDS以其高度的灵活性和可伸缩性,以及面向数据的通信方式,在自动驾驶系统中展现出了强大的应用潜力。而SOME/IP则以其专注于汽车电子系统的通信需求,以及简便的RPC和变更通知功能,在车辆内部和外部通信中发挥着重要作用。
综上所述,DDS和SOME/IP作为自动驾驶中间件中的两种重要通信协议,各自具有独特的优势和应用场景。在实际应用中,应根据系统的具体需求和资源限制,选择最合适的中间件技术,以实现高效、稳定的通信和协作。
